Sunday, May 07, 2006
Final proposal is really a step leading to another. The building of any object, regardless of if it already exists, allows for the possibility to spring board into a new direction. If there is any one thing to be learned it is the sharpening of the skill which allows us to envision with greater clarity a intended proposal. In such a manner is this class in the process of design. My initial steps came from personal interests and experience in answering the conclusions found from the two early flexinol prototypes. This early initiation can be viewed as a either intuition or a misstep. However, in the finality of a class such as this the real beauty is in the variation of proposals from the class. In that exposure we individually will hopefully retrace our initial steps and question those choices for the next proposed problem. In that, my point would be that for prospective students to initially think of this class as an extension of where technics leaves off and begin by researching not a final object to propose but what in essense you are building for. The most useful criticism to be bought forward in this class was "The what for ?" or "What to build next?"and especially the "So what" aspect. The world is full of useless from concept trinkit objects, do not create any futher disposable objects.
Tuesday, May 02, 2006
Here is code to make 8 sensors and 8 Flexinol wires work simultaneously:
'{$STAMP BS2}
'{$PBASIC 2.5}
DIR0 = 1
S0 VAR Bit
DIR2 = 1
S2 VAR Bit
DIR4 = 1
S4 VAR Bit
DIR6 = 1
S6 VAR Bit
DIR8 = 1
S8 VAR Bit
DIR10 = 1
S10 VAR Bit
DIR12 = 1
S12 VAR Bit
DIR14 = 1
S14 VAR Bit
Start:
FREQOUT 0,1,38500 'sends out signal to IR LED
S0 = IN0 'Stores reply
DEBUG 0,"SENSOR0 = ",DEC S0, CR 'displays the
results
IF S0 = 0 THEN
HIGH 1
ENDIF
FREQOUT 2,1,38500 'sends out signal to IR LED
S2 = IN2 'Stores reply
DEBUG 2,"SENSOR2 = ",DEC S2, CR 'displays the
results
IF S2 = 0 THEN
HIGH 3
ENDIF
FREQOUT 4,1,38500 'sends out signal to IR LED
S4 = IN4 'Stores reply
DEBUG 4,"SENSOR4 = ",DEC S4, CR 'displays the
results
IF S4 = 0 THEN
HIGH 5
ENDIF
FREQOUT 6,1,38500 'sends out signal to IR LED
S6 = IN6 'Stores reply
DEBUG 6,"SENSOR6 = ",DEC S6, CR 'displays the
results
IF S6 = 0 THEN
HIGH 7
ENDIF
FREQOUT 8,1,38500 'sends out signal to IR LED
S8 = IN8 'Stores reply
DEBUG 8,"SENSOR8 = ",DEC S8, CR 'displays the
results
IF S8 = 0 THEN
HIGH 9
ENDIF
FREQOUT 10,1,38500 'sends out signal to IR LED
S10 = IN10 'Stores reply
DEBUG 10,"SENSOR10 = ",DEC S10, CR 'displays
the results
IF S10 = 0 THEN
HIGH 11
ENDIF
FREQOUT 12,1,38500 'sends out signal to IR LED
S12 = IN12 'Stores reply
DEBUG 12,"SENSOR12 = ",DEC S12, CR 'displays
the results
IF S12 = 0 THEN
HIGH 13
ENDIF
FREQOUT 14,1,38500 'sends out signal to IR LED
S14 = IN14 'Stores reply
DEBUG 14,"SENSOR14 = ",DEC S14, CR 'displays
the results
IF S14 = 0 THEN
HIGH 15
ENDIF
PAUSE 1000
LOW 1
LOW 3
LOW 5
LOW 7
LOW 9
LOW 11
LOW 13
LOW 15
GOTO Start
Tuesday, April 18, 2006
Matthew,
the following link has in stock the SSIR sensor. I was given the tracking # for the order I placed last night. Very quick turn around.
http://www.hobbyengineering.com/
Search the part as SSIR infrared sensor kit # 28019
Saturday, April 15, 2006




Tuesday, April 11, 2006
{kind=link}
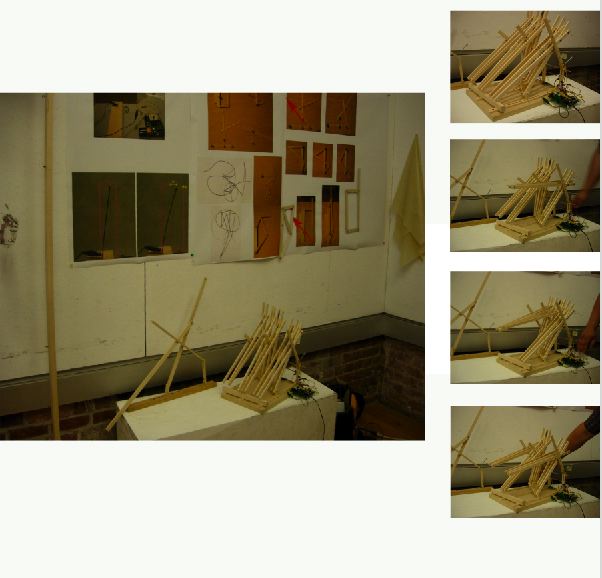
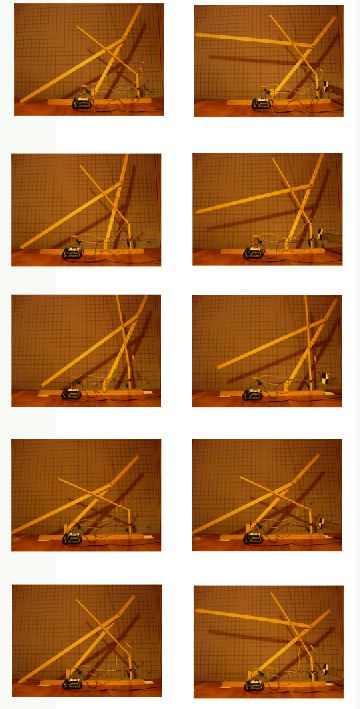
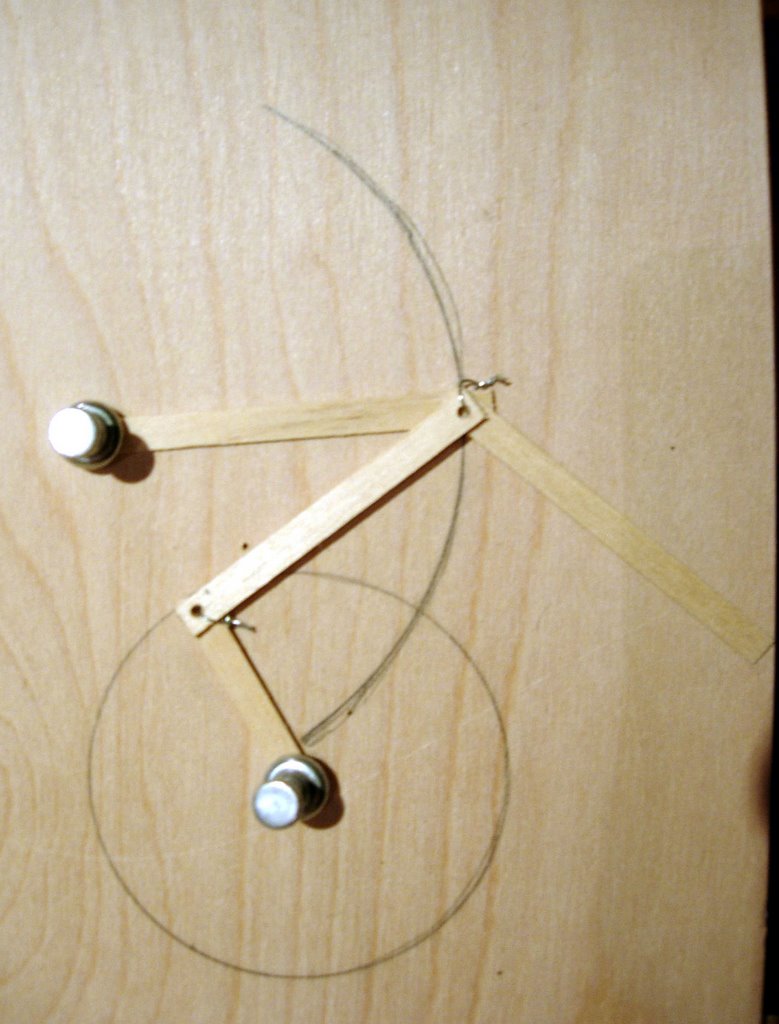
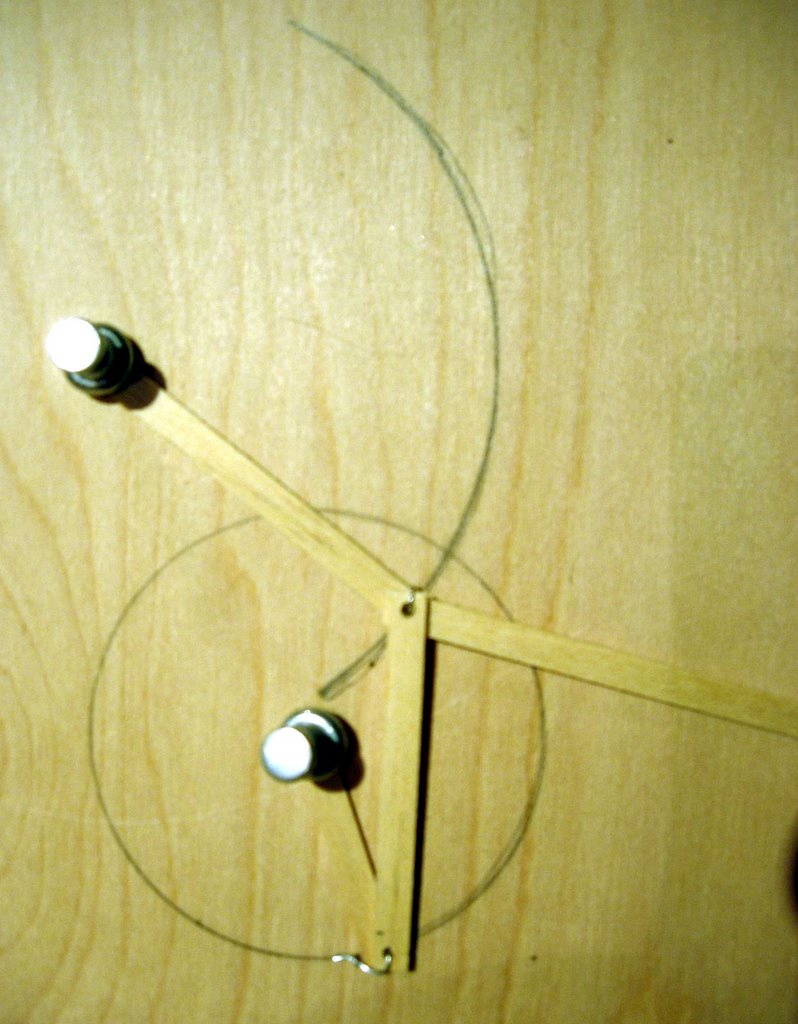
FINAL PROPOSAL: lever arm/membrane wall section
the "death match between lever arm and membrane" enacted with light.
the final model envisions itself at a 3' width, approx. 6" depth, and 3' height. the input will be received from infrared sensors. the processing will be on/off translated from detected movement. the output will be: lever arm deforming membrane. this deformation will follow to actuate aperture in the membrane wall. the wall interior is lit. light will reveal itself when movement is present.
the materials:
.010-.015 gauge flexinol (6"-12")
infrared sensor (2)
low power lamp
fiberglass rod (1/16"-5/32" diameter) (up to 3/4" for substructure)
silicone tubing (fda grade 3/32 x 7/32)
silicone sheet (commercial grade, red, durometer 40, 1/32")
stainless steel circular clamp
lightweight cardboard composite
silicone rtv adhesive
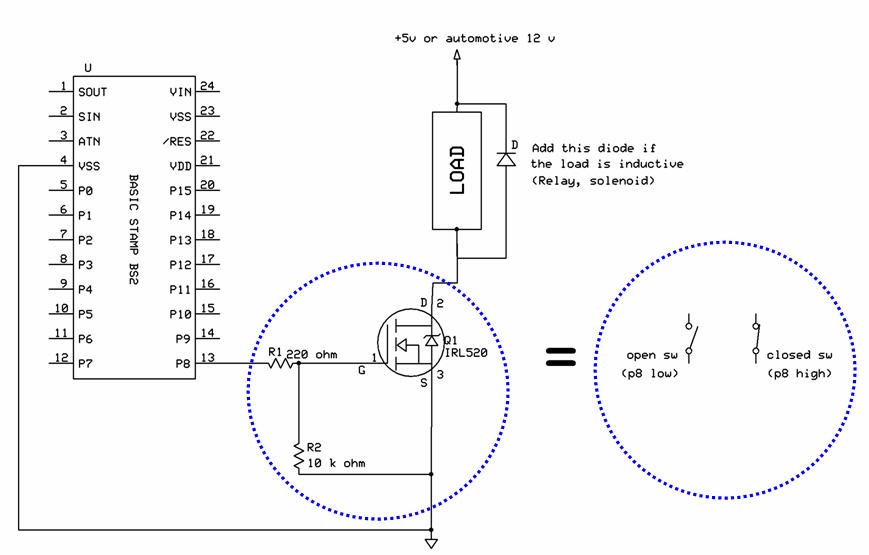
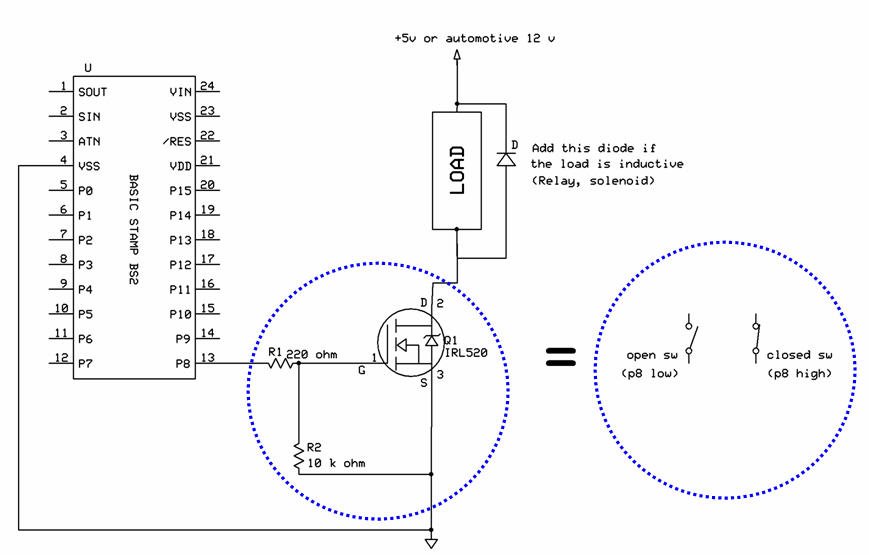
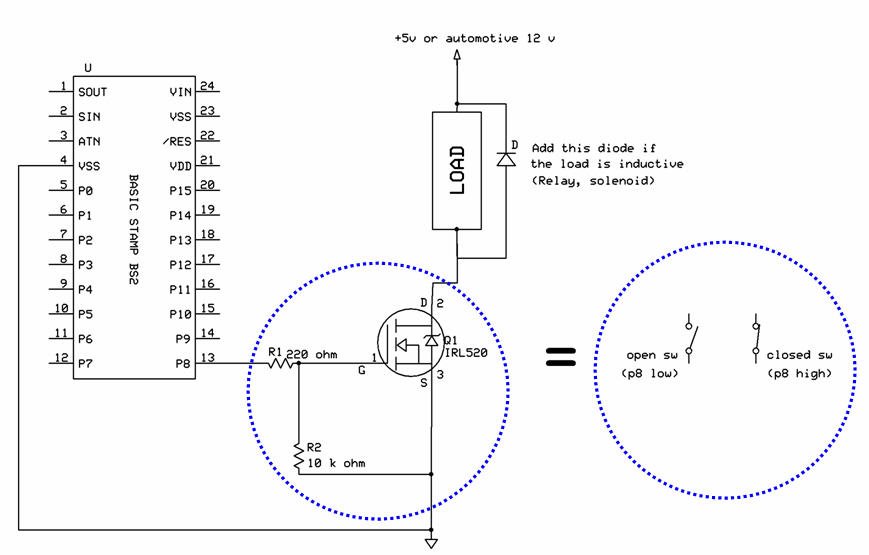
for rewiring breadboard:
irl520 mosfet
220 ohm resistor
external power source
both the lever arms and membrane will be structured off of a fiberglass rod substructure. an enclosure for the light will be constructed with light-weight cardboard composite.
CRUX: the project will run four wires. the necessary ampere current will be achieved by rewiring the breadboard with the irl520 and including a 220 ohm resistor to protect the stamp i/o pin. the external power source has not yet been determined.
the below schematic illustrates the rewire. if anyone may shed light/offer technical support in instrumenting the new schematic-PLEASE OFFER ASSISTANCE. we would gladly repay you.
{kind=link}
matthew & twain
Monday, April 10, 2006
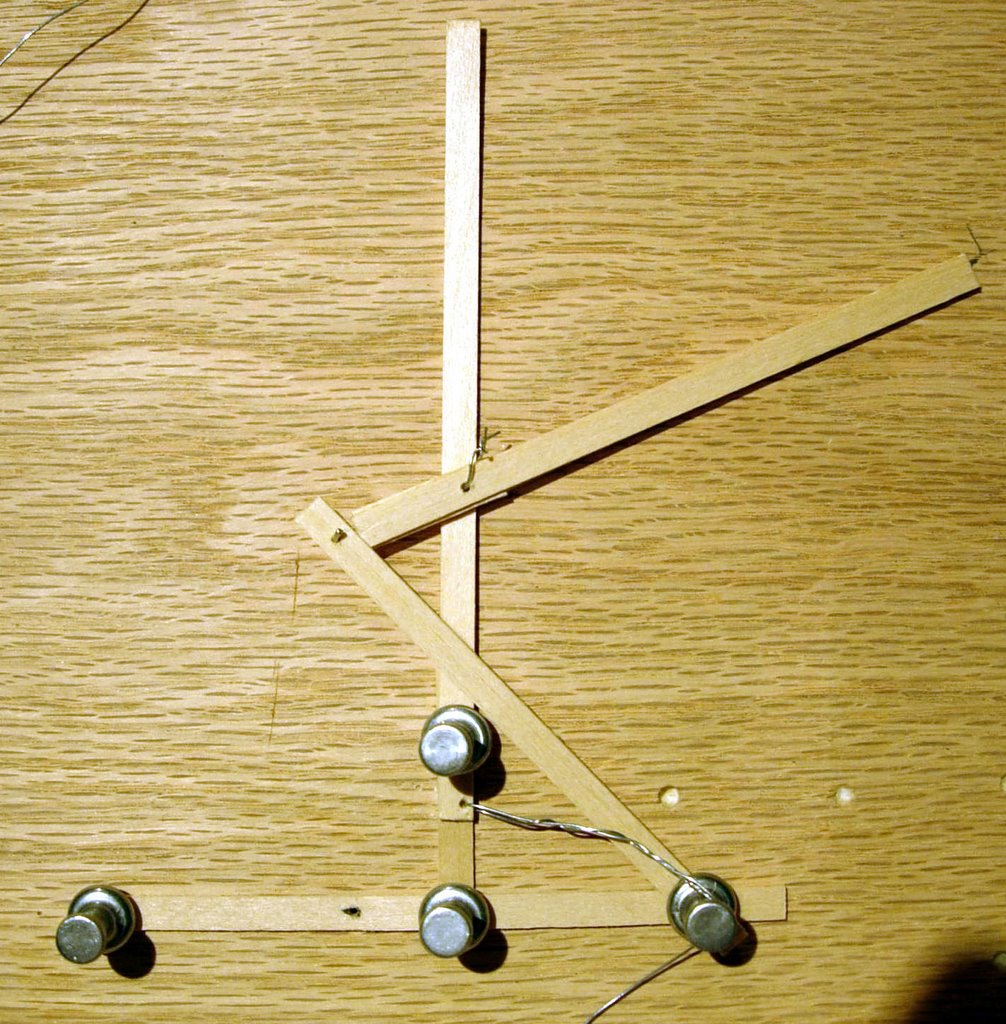
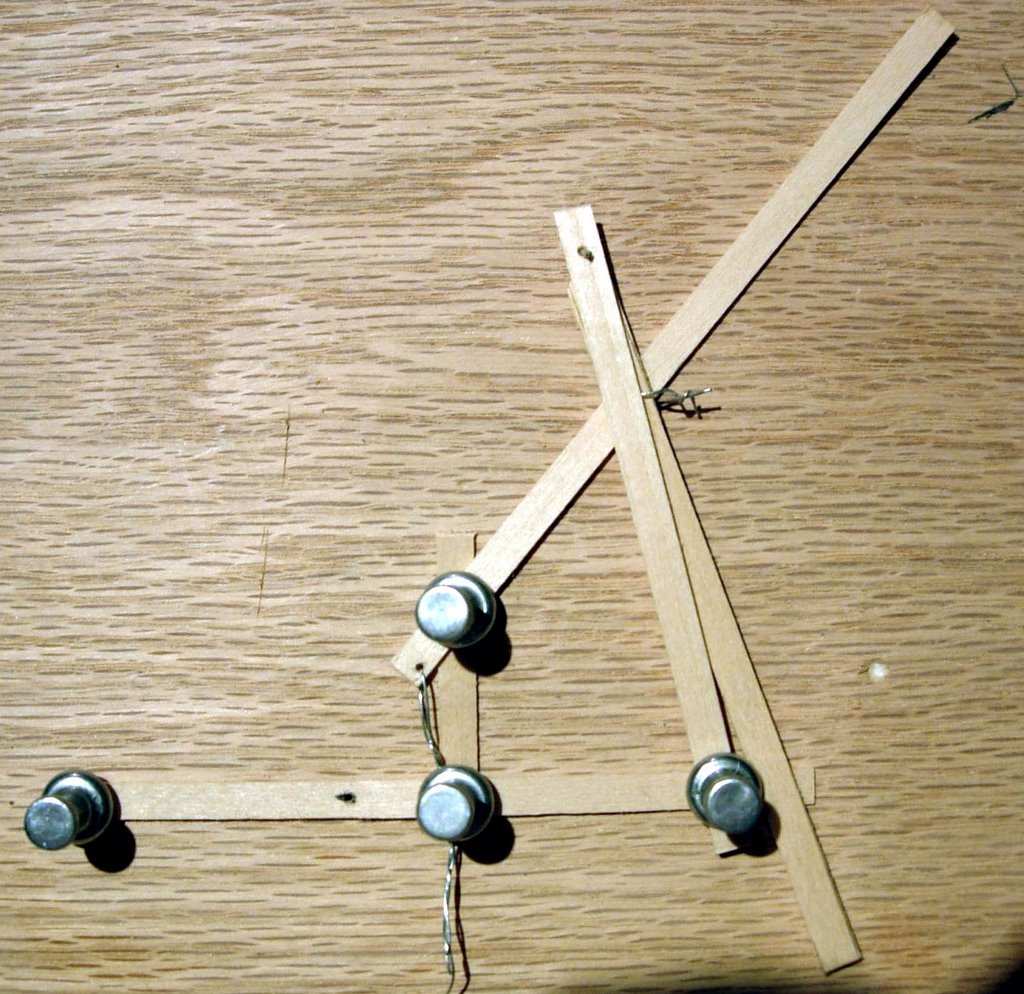
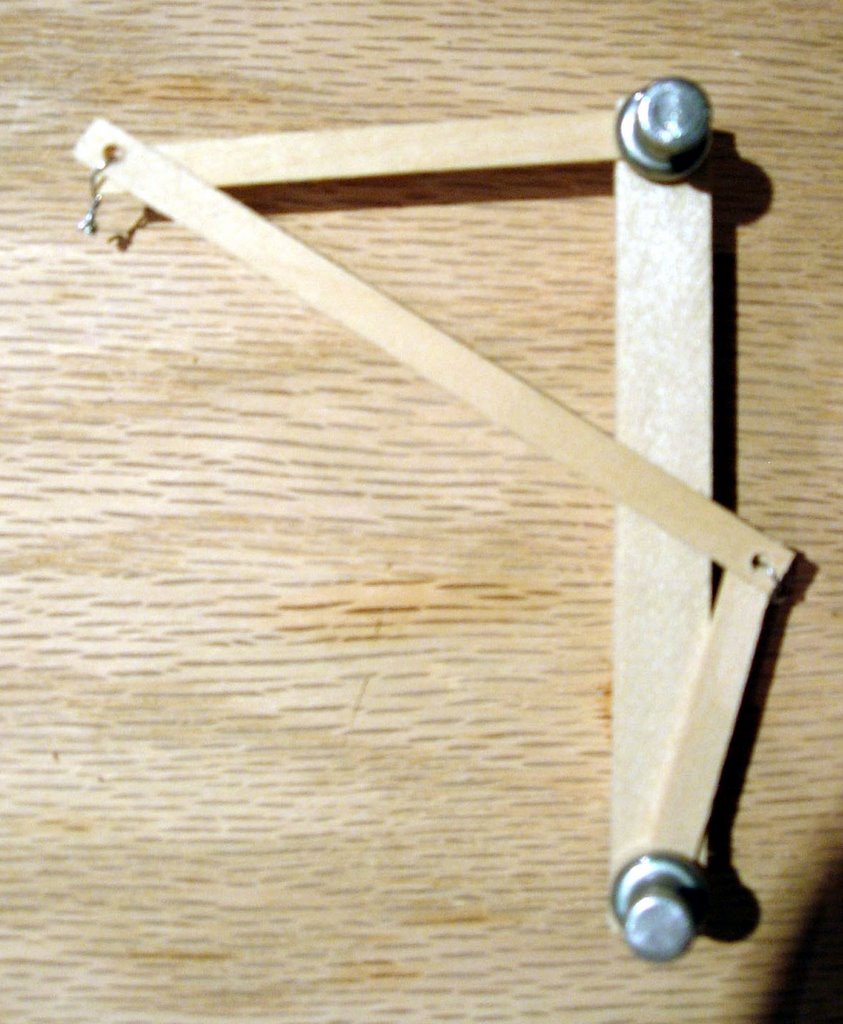
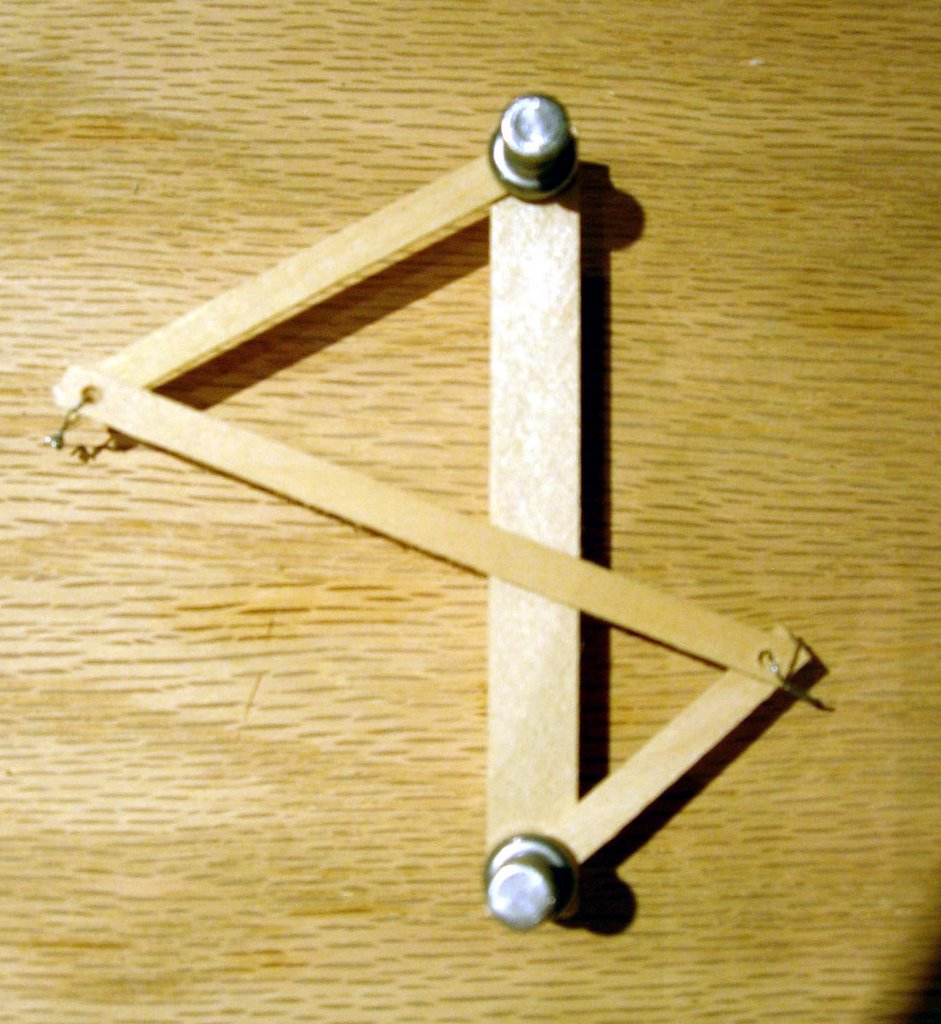
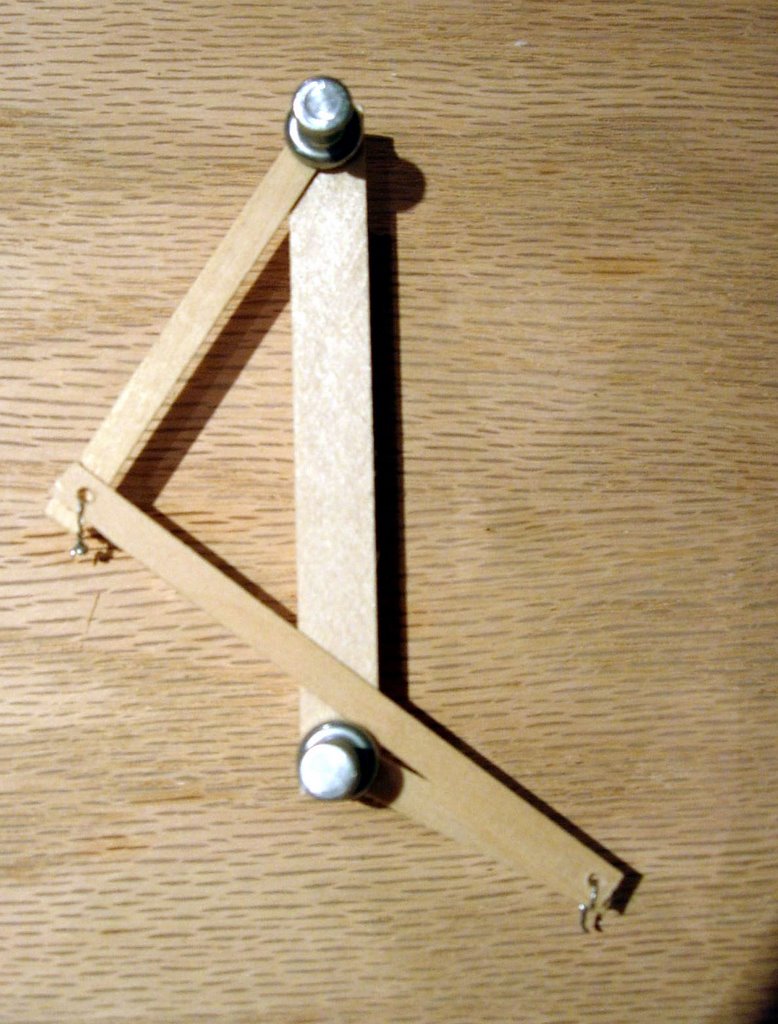
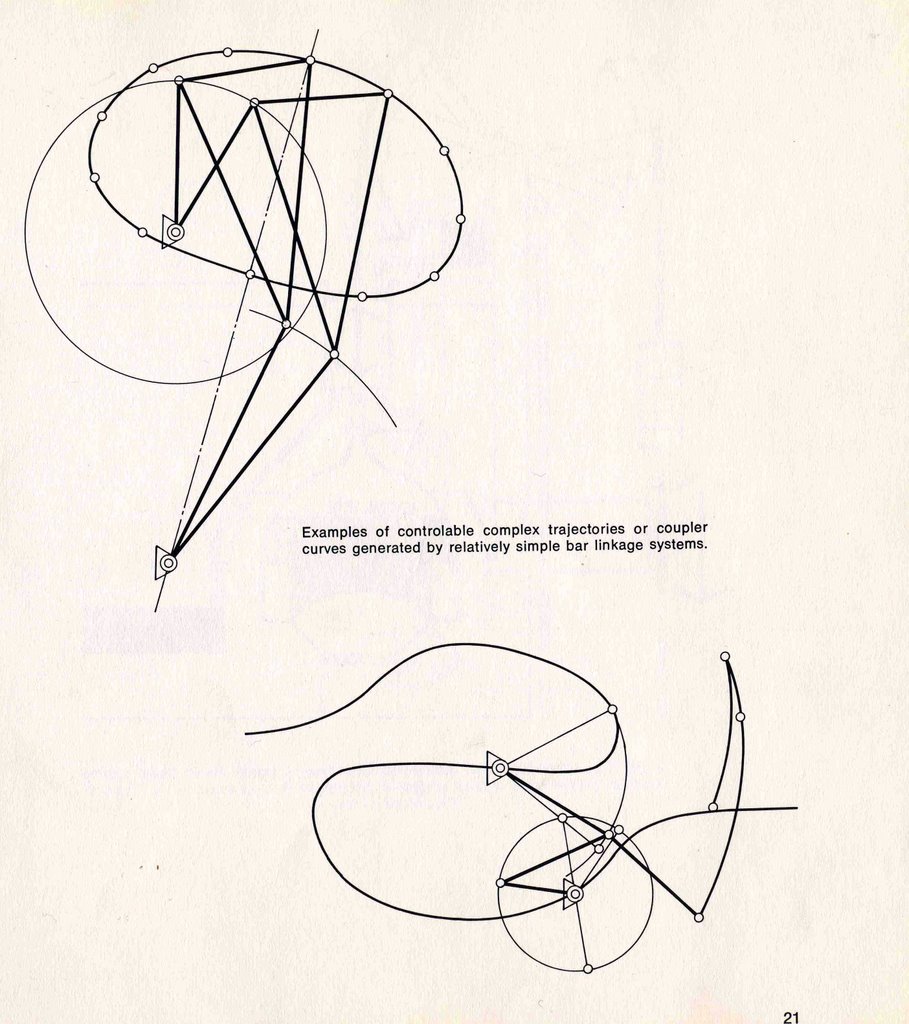
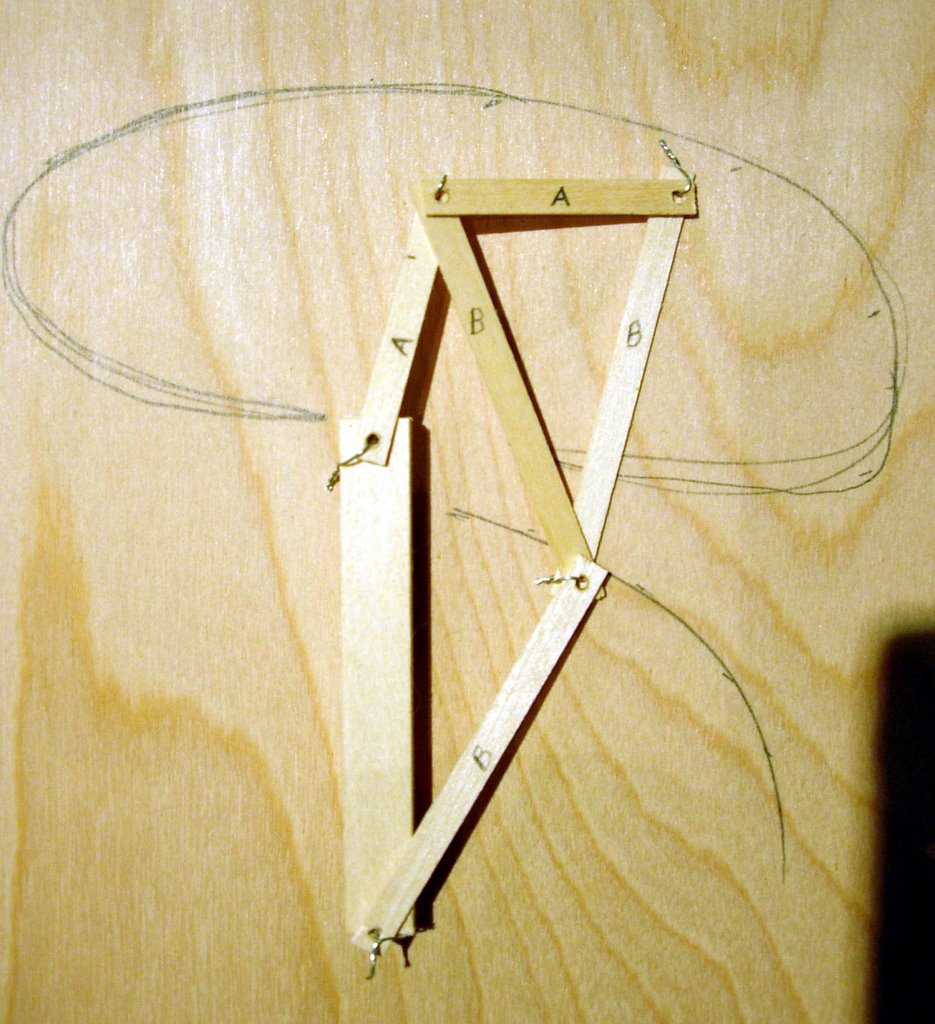
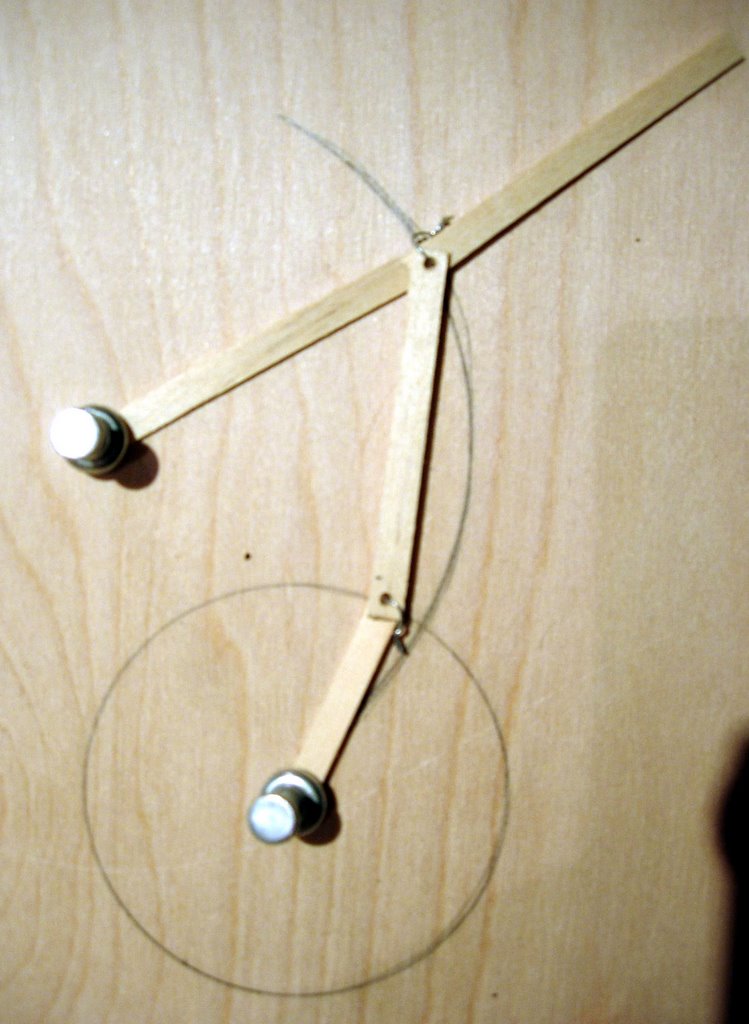
Researched a fantastic information resource through Cornell that was recommended to me from one of our critics. Found what can be a solution to my joint issue. Will continue in bettering this point of my arm. Once this solution is completed the arm will be replicated to eight copies at 1/3rd smaller than the current size. Every third arm will be an active flexinol enhanced unit with a infra red sensor as per the original. In my cause the sensors will be acting as a carbon dioxide sensor within the confides of the triangulated structure of the arm apparatus. These envelopes will be representative of a Calatrava scale structure which when due to exceeding carbon dioxide levels from its occupants will actuate the sensors to varyingly open the structures points releasing the gases . On a micro scale this will be indicitave of the global effort to acknowledge global warming which is increasingly affected by increasingly rising carbon dioxide levels from a growing population as a facet amoungst numerous other catalysts.
Saturday, April 08, 2006
I highly recommend this information source through Cornell. Especially for those who have mechanical aspects to their projects such as gears and arm linked movements. It can be a incredible time saver as opposed to trial & error construction sampling.
http://kmoddl.library.cornell.edu/index.php
Saturday, March 11, 2006
Friday, March 10, 2006



Sunday, March 05, 2006
http://www.thelivingnewyork.com/LivingArchitecture/Miklos/Singular.mov
http://www.thelivingnewyork.com/LivingArchitecture/Miklos/Dual_movement.mov
http://www.thelivingnewyork.com/LivingArchitecture/Matthew+Twain/hanging_strip.mov
http://www.thelivingnewyork.com/LivingArchitecture/Matthew+Patrick+Felice/2006_02_17_277.avi
http://www.thelivingnewyork.com/LivingArchitecture/Matthew+Patrick+Felice/Livearch015.avi
http://www.thelivingnewyork.com/LivingArchitecture/Matthew+Patrick+Felice/Livearch016.avi
http://www.thelivingnewyork.com/LivingArchitecture/Matthew+Patrick+Felice/Livearch018.avi
http://www.thelivingnewyork.com/LivingArchitecture/Jesse/porter_proto4-1.MOV
http://www.thelivingnewyork.com/LivingArchitecture/Jesse/porter_proto4-2.MOV
http://www.thelivingnewyork.com/LivingArchitecture/Hannah+Michael/MVI_1840.AVI
http://www.thelivingnewyork.com/LivingArchitecture/Hannah+Michael/MVI_1842.AVI
http://www.thelivingnewyork.com/LivingArchitecture/Hannah+Michael/MVI_1844.AVI
http://www.thelivingnewyork.com/LivingArchitecture/Hannah+Michael/MVI_1845.AVI
http://www.thelivingnewyork.com/LivingArchitecture/Becky+Gary/DSCF0018.AVI
http://www.thelivingnewyork.com/LivingArchitecture/Becky+Gary/DSCF0024.AVI
Saturday, February 25, 2006
You should be able to find the "old" sensor from our Prototype 1 assignement on a variety of other hobby robotics web sites.
Here is one listing:
http://www.hobbyengineering.com/H1469.html
http://www.kitsusa.net/phpstore/index.php
You can check out work from the Columbia students at:
http://lasp06c.blogspot.com/
Tuesday, February 14, 2006
Check out this website, if you may not have already and especially the second:
http://www.ics.uci.edu/~eppstein/junkyard/all.html
http://www.ics.uci.edu/~eppstein/junkyard/labtile/
Tuesday, February 07, 2006
Sunday, February 05, 2006
INSPIRATION: STREAMSIDE DAY FOLLIES
by Pierre Huyghe
http://www.stage-directions.com/articles/dia.shtml
Friday, February 03, 2006
http://www.media.mit.edu/physics/pedagogy/fab/fab_2002/help_pages/joepelectronicsprimer.htm
INSPIRATION: OMNIVISU
http://www.designberuehrtherz.de/projects.php?stud=19&proj=3&img=1&lang=de
http://www.arch.kth.se/a-url/
Check out Terrarizer, Lemon Concerto, and Mediated Spaces (http://www.arch.kth.se/mediatedspaces/)
Thursday, February 02, 2006
INSPIRATION: EAMEX
Japanese EAP company
http://www.thelivingnewyork.com/lab/kurage.wmv
http://www.eamex.co.jp/index_e.html
EAPs in general have a wide range of motion. It can also be more precisely controlled.It's strength at this moment is significantly weaker than SMAs. (Shape Memory Alloy, like Flexinol)The first world arm wrestling challenge between human and robots using EAP actuated artificial muscle was held last year. This may indicate improvements in the strength of EAPs.
Wednesday, February 01, 2006
by Usman Haque and Adam Somlai-Fischer
http://lowtech.propositions.org.uk/
http://www.lce.hut.fi/publications/annualrep/node21.html
http://robotecture.com/index.php?option=com_simpleboard&Itemid=40
Directed by Kas Oosterhuis
http://www.bk.tudelft.nl/live/pagina.jsp?id=f878960b-0ab5-4a32-bbe6-4e5e7e903887&lang=nl
Inexpensive off-the-shelf prduct that has a 'logic module' already set up. Could be interesting to hack into.
http://www.solarilluminations.com/acatalog/solar_floating_light.html
How solar yard light works
http://home.howstuffworks.com/solar-light.htm
MATERIAL: ELECTRONICS/ROBOTICS PARTS SHOP
http://www.digikey.com/
http://www.junun.org/MarkIII/Store.jsp
http://science.howstuffworks.com/question363.htm
EAP Article in Wired
http://www.wired.com/wired/archive/12.03/start.html?pg=13
Manufacturer of EAP
http://www.environmental-robots.com/
http://www-istp.gsfc.nasa.gov/Education/FAQs2.html#q28
by Roger G. Gilbertson
http://www.amazon.com/gp/product/1879896133/104-5247449-7695906?v=glance&n=283155
Tuesday, January 31, 2006
http://jlnlabs.imars.com/lifters/hexalifter/index.htm
http://jnaudin.free.fr/lifters/tubular/index.htm
http://jlnlabs.imars.com/lifters/hexalifter/videos/hexalifter.rm
http://jnaudin.free.fr/lifters/tubular/LifterTest.wmv
http://www.parallax.com/dl/src/prod/PIR-Demo-Code-V1.0.ziphttp://www.parallax.com/dl/docs/prod/audiovis/PIRSensor-V1.1.pdfhttp://www.scary-terry.com/itw/pirsensor/pirsensor.htm
